Puzzlebot hacker edition
The PuzzleBot Hacker Edition contains all the essential components needed to quickly access meaningful robotics capabilities (i.e. a programmable, roaming robot) and provides a user-friendly platform for incorporating a wide range of advanced add-on feature-sets.
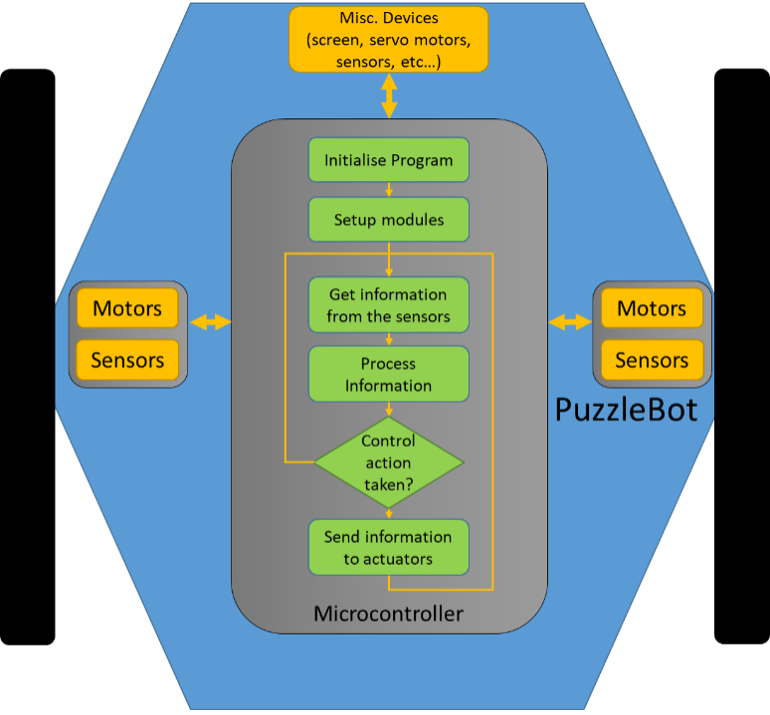
How does it work?
PuzzleBot Hacker Edition has two main configuration options. Depending on how it is used, the user can select between the following configurations.
Standalone configuration
- The user directly programmes the Hacker Board.
- Libraries for communication with computing units and different sensors and actuators are provided by Manchester Robotics Limited.
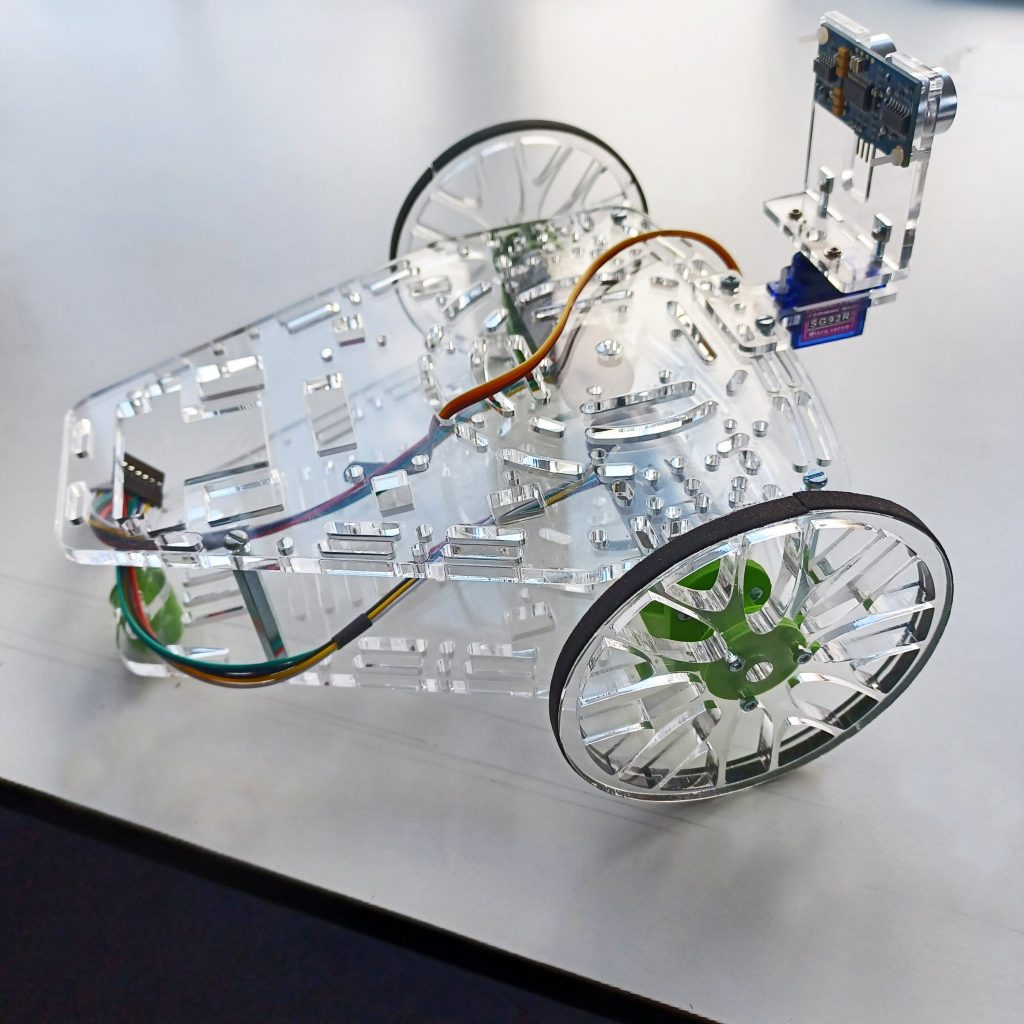
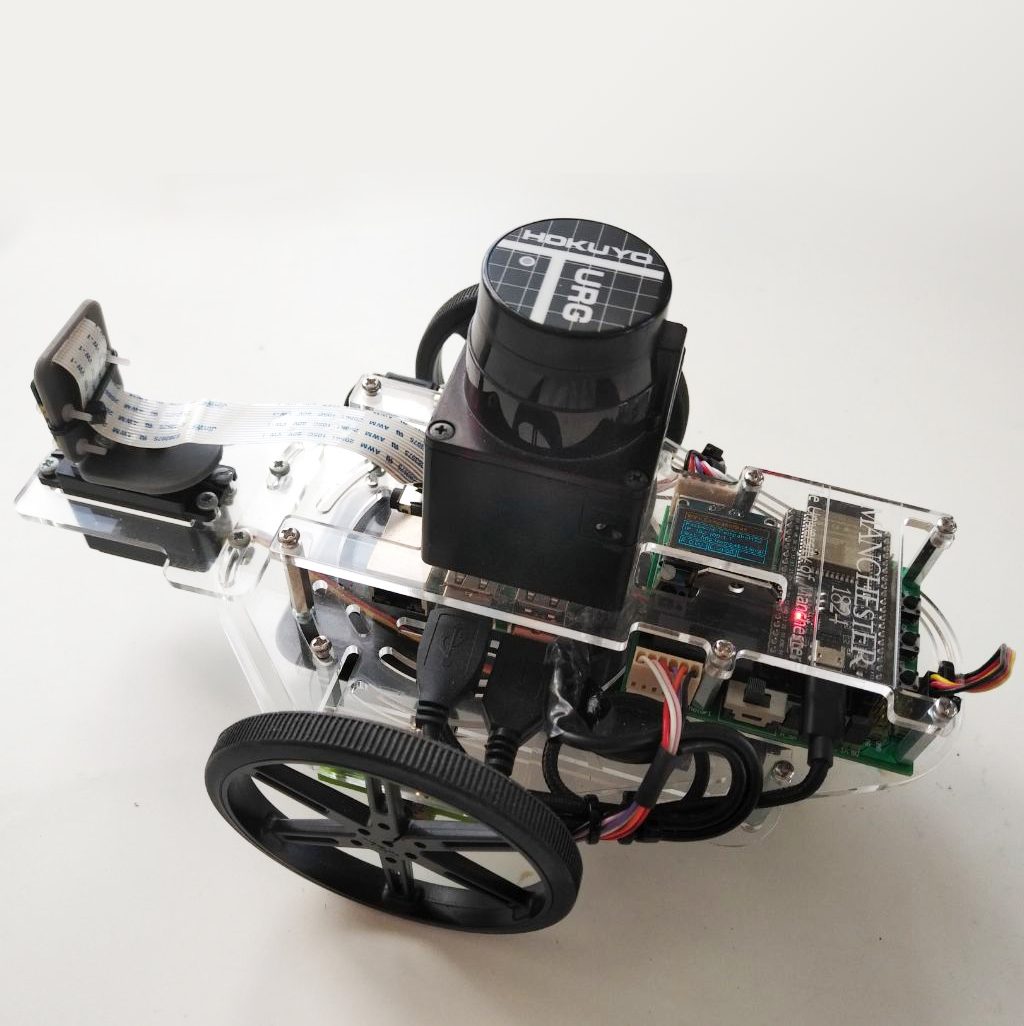
- More peripherals can be attached (e.g. screen, sonar, IR sensor, LiDAR, etc.)
- Basic control libraries are provided.
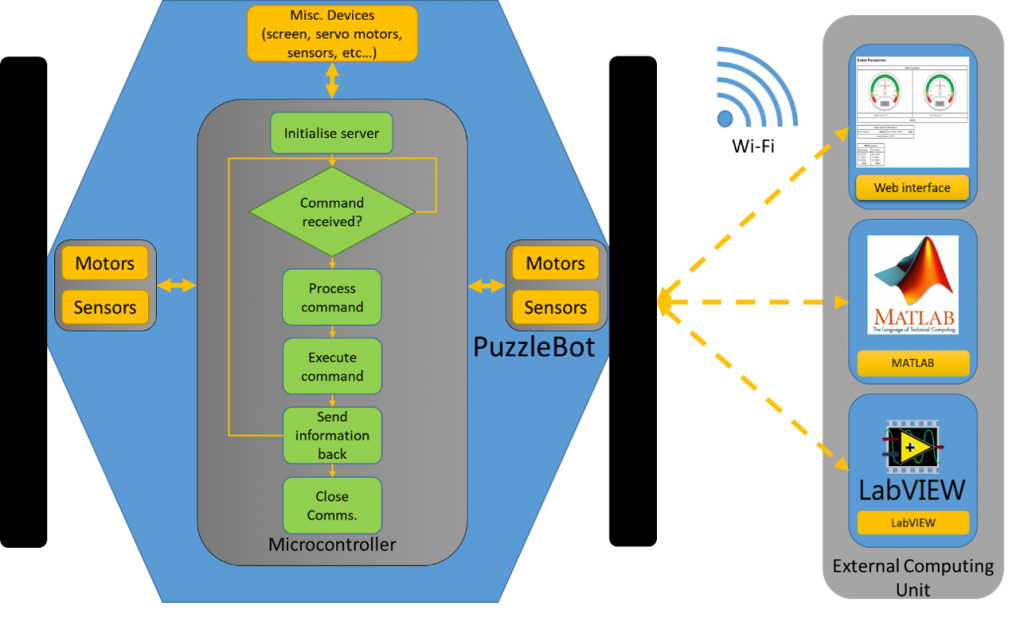
External-Control configuration
- The robot is controlled from an external computing unit.
- The communication is done via WIFI, the connection is done as a normal hotspot.
- The internal firmware and libraries for communicating with the robot are provided by Manchester Robotics Limited.
- The firmware contains libraries for the basic configuration (motors, servomotor, encoders, ultrasonic sensor, LiDAR, IR Reflectance sensor, screen, WIFI communication, etc.)
- The user has access to a basic web interface for testing by using any browser.
- MATLAB libraries for communicating with the sensors and actuators are provided by Manchester robotics. MATLAB contains a simulator for simulating the robot and its capabilities. MATLAB does not require any extra libraries for working.
- LabVIEW libraries for communicating with the sensors and actuators are provided by Manchester Robotics. LabVIEW also contains a simulator with the basic capabilities of the robot. LabVIEW does not require any additional libraries or packages from a third party or NI to work.