hacker BOARD
How our design approach is different to existing single-board computers?
Typically, three components make up a robotics starter kit:
The first component consists of chassis, motors and sensors, a kind of Musculoskeletal system.
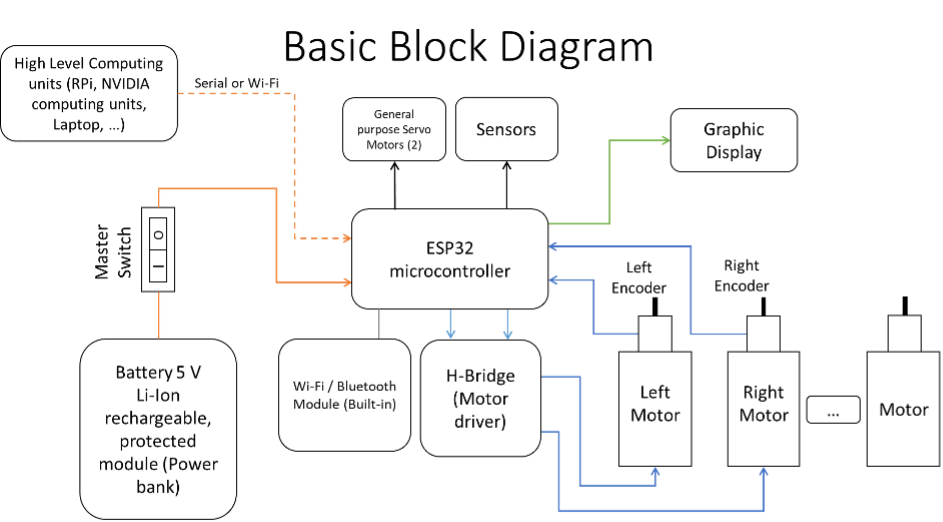
The next component is a control module board, typically something repurposed from DIY electronics, something like Arduino.
Finally it is common for overpowered processing units, required for on-board computations, to be used for low-level robotics. This can be something as powerful as NVIDIA Jetson, or a repurposed Raspberry PI.

The approach we take is to create a control module, the Hacker Board, that has inputs and outputs specifically appropriate for robotics. To have enough parts for multiple robotics sensors and actuators, and to handle the communication and the power requirements. A very important aspect is that our module adds minimum viable, real-time processing capabilities such that we don’t have to grapple with an NVIDIA Jetson. So, you can do basic robotics without having to ‘put things together’ and to struggle to install additional libraries. This provides a streamlined path for people to engage with NVIDIA Jetson, only when its power is required, i.e., machine learning and robotic vision which doesn’t require real-time processing capabilities.
With PuzzleBot, you use the Hacker Board for algorithms which require real-time processing capabilities, such as: low level control, navigation, obstacle avoidance, 2D-LiDAR based SLAM, and fault tolerant control. Then, an NVIDIA Jetson Nano can be connected with the Hacker Board for high performance computing, for non-real time tasks, such as: robot vision, visual SLAM, mission planning and path-planning.
Proficient users who wish to design and build their own hardware from scratch can purchase the Hacker Board as a stand-alone Development Board.